Rapid and Autonomous Automation
Current automation approaches are optimized for mass production of identical goods, and the engineering of according systems is a costly and labor-intensive process. Reasons for this are fractured and closed ecosystems, impossibility of the reuse of solutions, and the immense requirements on reliability and cost.
This research aims to provide reusable, universally applicable solutions for core challenges in robot-based automation, mirroring achievements in the software industry. Additionally, we seek to enable fully autonomous, lot-size-one manufacturing systems.
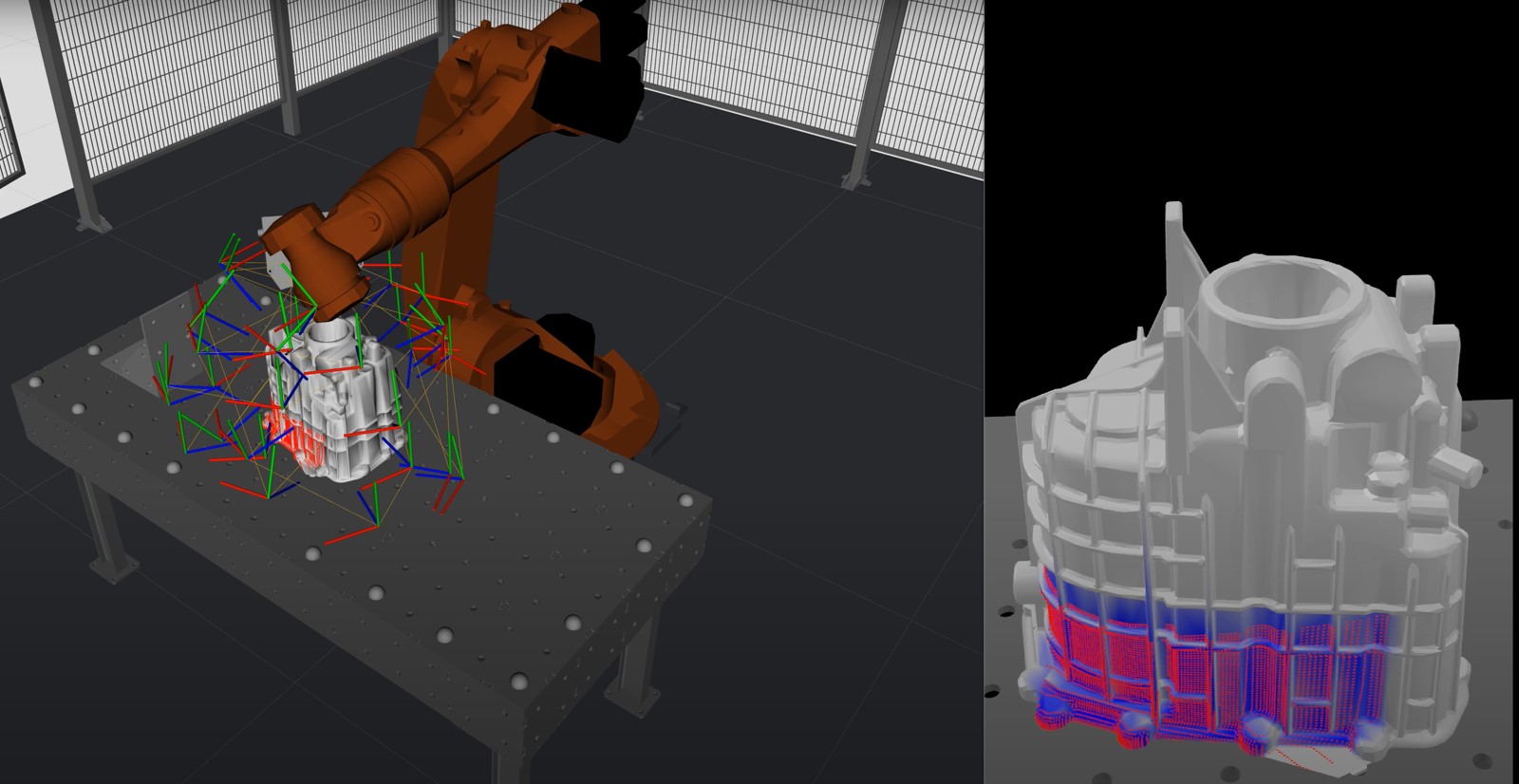
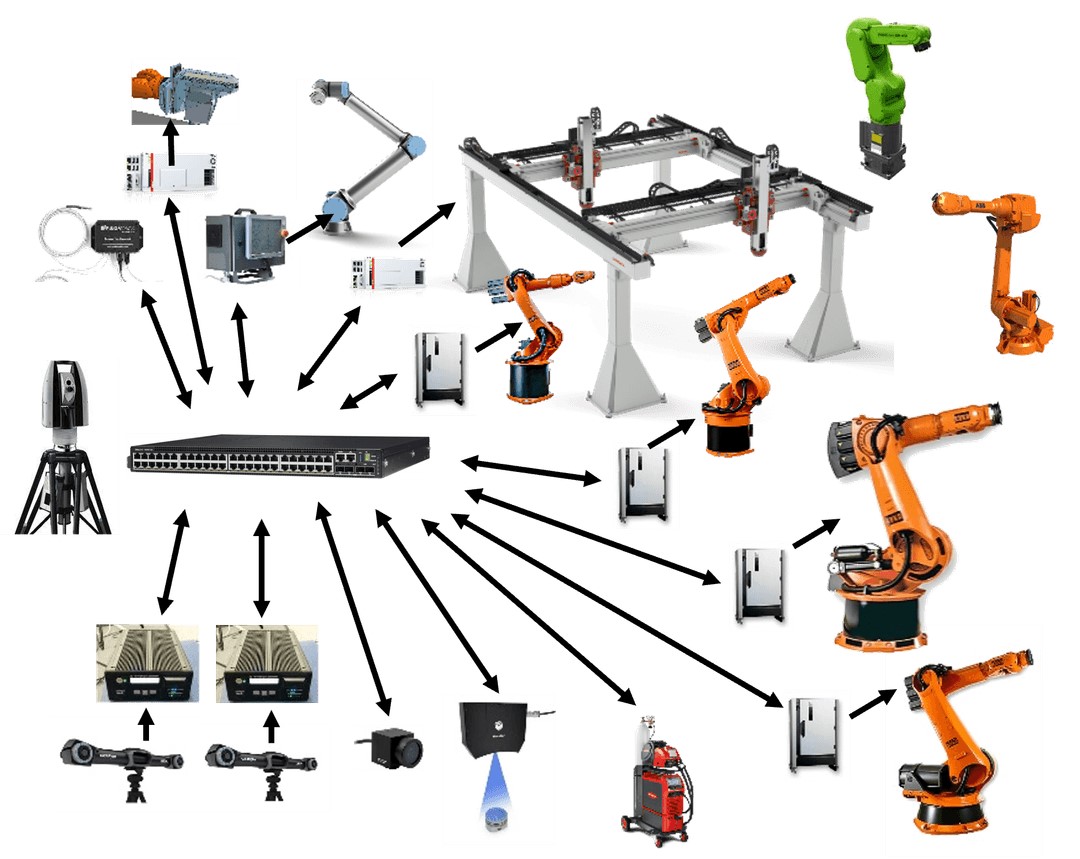
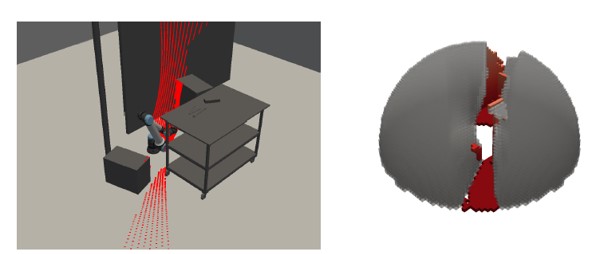
Progress includes hardware-independent process definition, intuitive multi-robot teaching, autonomous workspace exploration, fully autonomous 3D measurement, and a assembly cell concept for software-defined manufacturing. Ongoing research focuses on multi-robot path planning, hard real-time control with Python from local servers, and developing a retrofittable collision detection system.
For more information about the IRC visit the group-page: www.irz.ethz.ch