Robot Accuracy
This initiative addresses critical issues in robot accuracy in both classical "teach and repeat" and dynamic planning scenarios. Achieving high repeatability is challenging due to thermal deformations. To achieve absolute accuracy, necessary in dynamic planning scenarios, especially in lot-size one application, all the relevant effects have to be addressed such as: Thermal deformations, geometric inaccuracies, deflection under load, joint linearities and backlash. The absence of general solutions to these problems makes industrial robots for a lot of use-cases unfeasible as kinematic platforms.

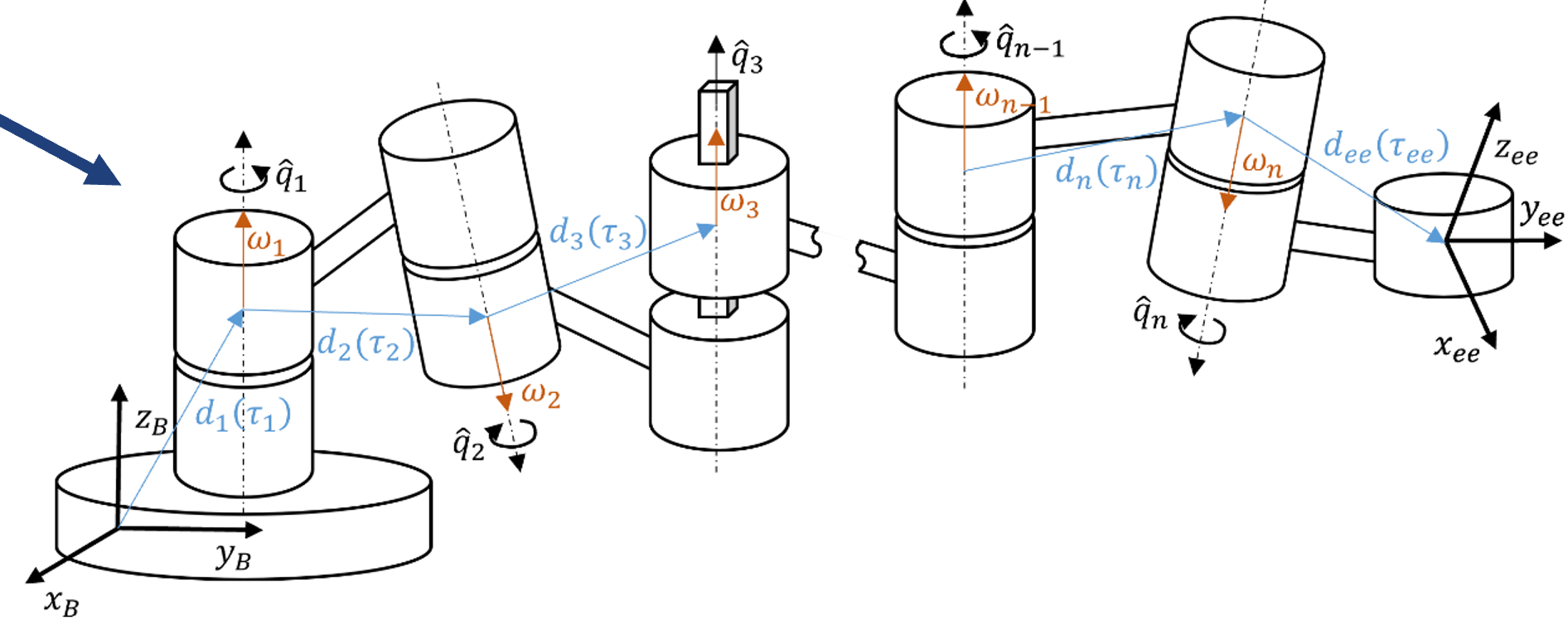
The initiative aims to create a universal robot model capable of handling both revolute and prismatic joints and is able to express all relevant effects, in the static and dynamic case. We target to develop a universal approach which works without case-custom modelling and is applicable by technicians.
Currently, the static problem has been solved for revolute joints, and a separate model has been developed for prismatic joints in static scenarios. Future work will focus on dynamic cases for both joint types, with the ultimate goal of creating a comprehensive model for all robot types and combinations of them to make robots accurate and cost-effective kinematic platforms.
For more information about the IRC visit the group-page: www.irz.ethz.ch